iCLEBO Arte инструкция на русском - страница 11
пылесосаИспользование•Установка•
т
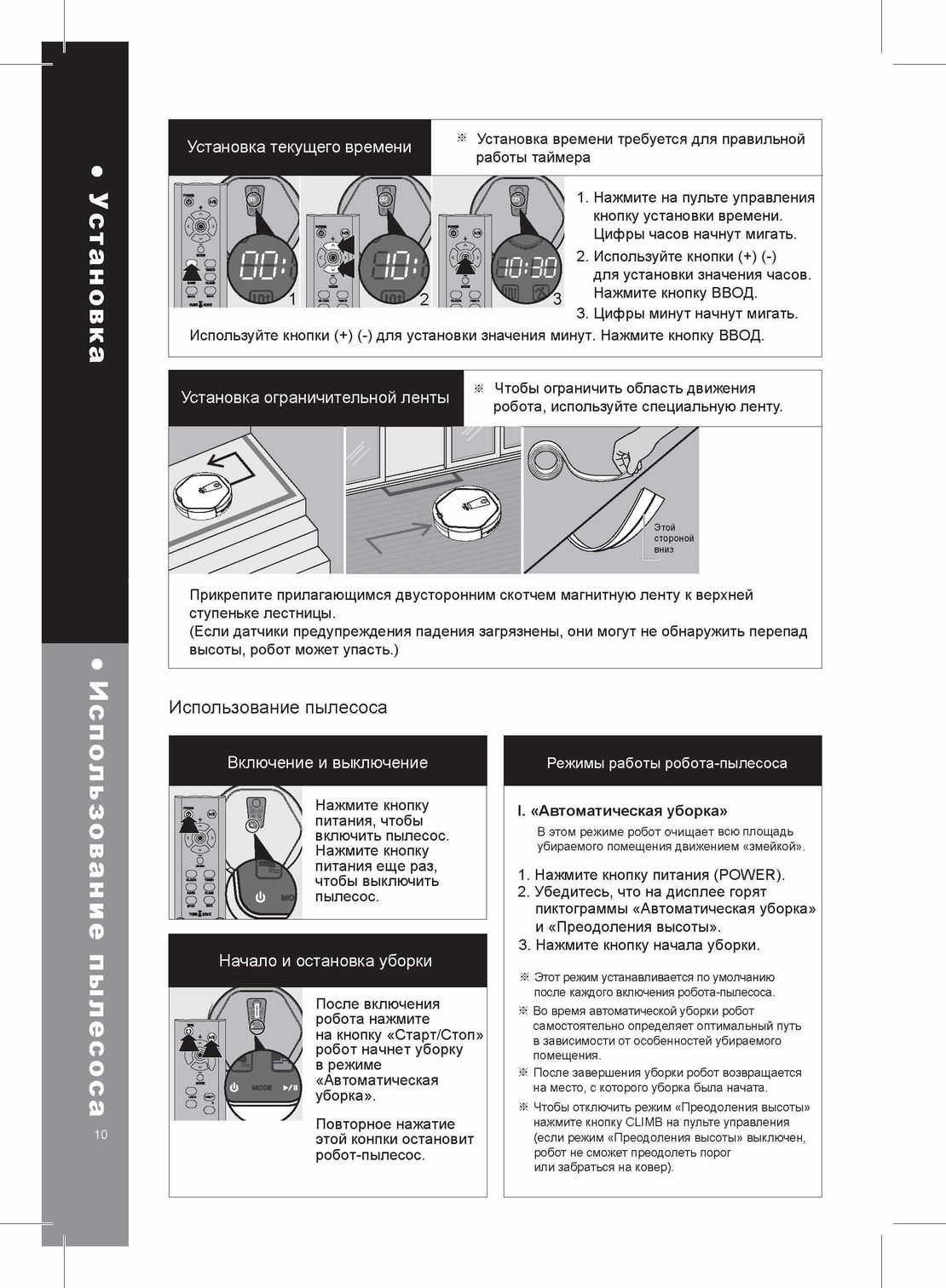
Установка текущего времени Установка времени требуется для правильнойработы таймера
1. Нажмите на пульте управления
кнопку установки времени.
Цифры часов начнут мигать.
2. Используйте кнопки (+) (-)
для установки значения часов.
Нажмите кнопку ВВОД.
3. Цифры минут начнут мигать.
Используйте кнопки (+) (-) для установки значения минут. Нажмите кнопку ВВОД.
Установка ограничительной ленты ж Чтобы ограничить область движенияробота, используйте специальную ленту.
Прикрепите прилагающимся двусторонним скотчем магнитную ленту к верхней
ступеньке лестницы.
(Если датчики предупреждения падения загрязнены, они могут не обнаружить перепад
высоты, робот может упасть.)
Использование пылесоса
Включение и выключение Режимы работы робота-пылесоса
.Е±®ж У Нажмите кнопку I. «Автоматическая уборка»,питания, чтобывключить пылесос.В этом режиме робот очищает всю площадь
ОооооО5 / Нажмите кнопку убираемого помещения движением «змейкой».питания еще раз,чтобы выключить1. Нажмите кнопку питания (POWER).пылесос.2. Убедитесь, что на дисплее горятпиктограммы «Автоматическая уборка»
и «Преодоления высоты».
3. Нажмите кнопку начала уборки.
Начало и остановка уборки
Ж Этот режим устанавливается по умолчанию
после каждого включения робота-пылесоса.
После включенияробота нажмитена кнопку «Старт/Стоп»робот начнет уборкуЖ Во время автоматической уборки роботсамостоятельно определяет оптимальный путьв зависимости от особенностей убираемогопомещения.
в режиме«Автоматическаяуборка». Ж После завершения уборки робот возвращаетсяна место, с которого уборка была начата.
Ж Чтобы отключить режим «Преодоления высоты»
Повторное нажатие нажмите кнопку CLIMB на пульте управления
10 этой конпки остановит (если режим «Преодоления высоты» выключен,
робот-пылесос. робот не сможет преодолеть порог
или забраться на ковер).
I
 6
6 7
7 8
8 9
9 10
10 12
12 13
13 14
14 15
15 16
16 Genio Deluxe 500 инструкция на русском
Genio Deluxe 500 инструкция на русском Clever & Clean M Series 004 инструкция на русском
Clever & Clean M Series 004 инструкция на русском iRobot Roomba 980 инструкция на русском
iRobot Roomba 980 инструкция на русском Bist Win A100 инструкция на русском
Bist Win A100 инструкция на русском Xiaomi Vacuum Cleaner инструкция на русском
Xiaomi Vacuum Cleaner инструкция на русском Xiaomi RoboRock инструкция на русском
Xiaomi RoboRock инструкция на русском