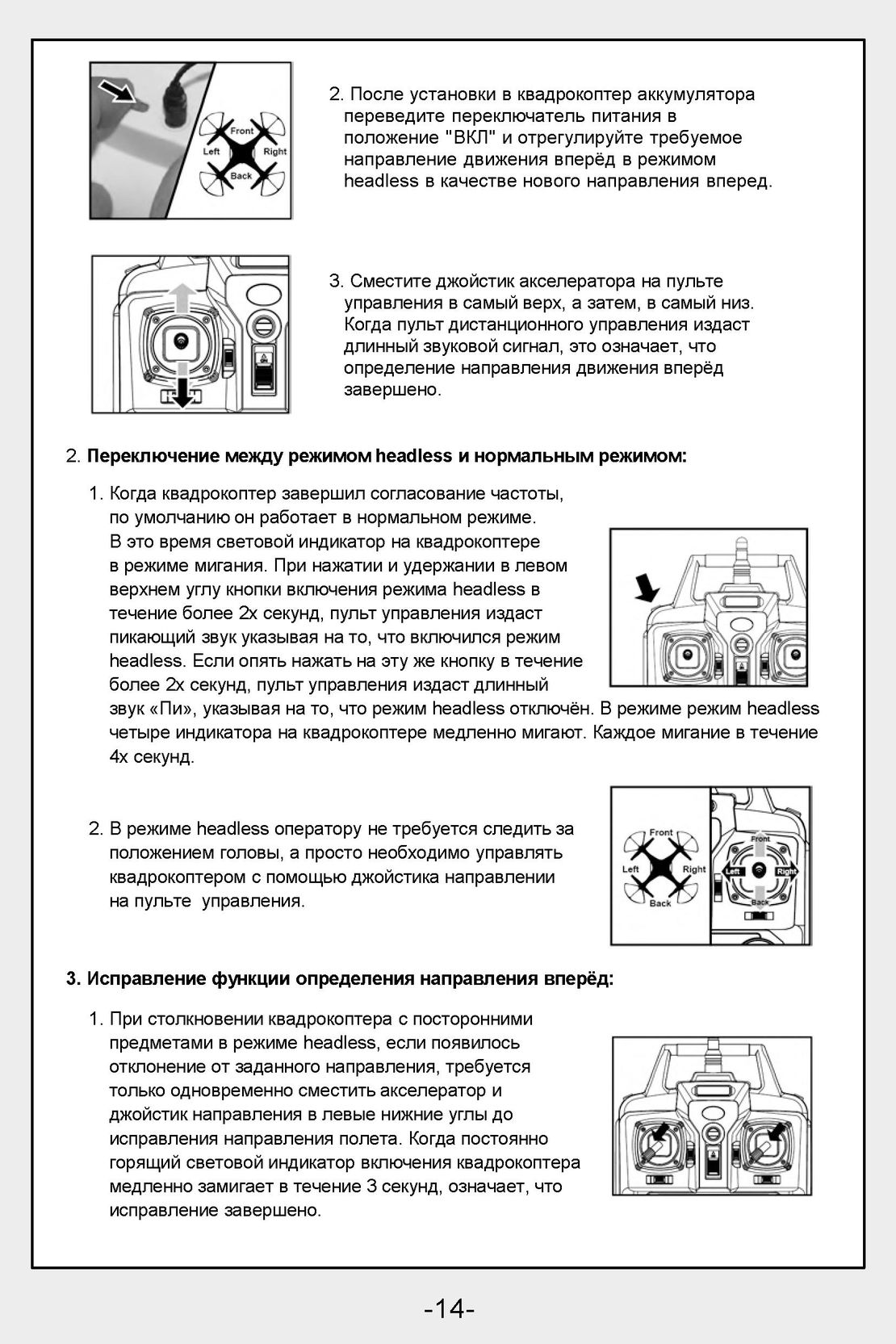
2. После установки в квадрокоптер аккумулятора
переведите переключатель питания в
положение "ВКЛ" и отрегулируйте требуемое
направление движения вперёд в режимом
headless в качестве нового направления вперед.
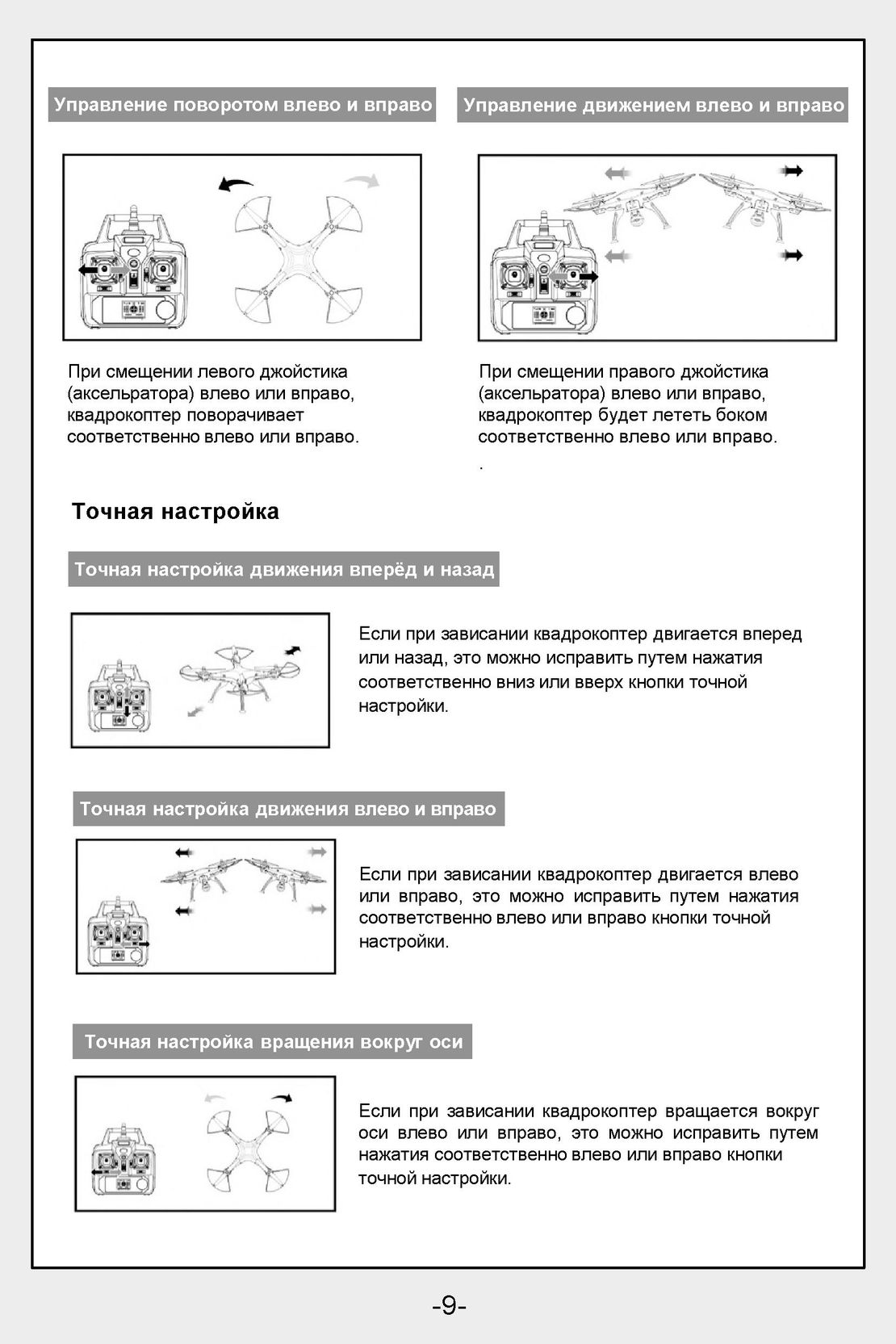
3. Сместите джойстик акселератора на пульте
управления в самый верх, а затем, в самый низ.
Когда пульт дистанционного управления издаст
длинный звуковой сигнал, это означает, что
определение направления движения вперёд
завершено.
2. Переключение между режимом headless и нормальным режимом:
1. Когда квадрокоптер завершил согласование частоты,
по умолчанию он работает в нормальном режиме.
В это время световой индикатор на квадрокоптере
в режиме мигания. При нажатии и удержании в левом
верхнем углу кнопки включения режима headless в
течение более 2х секунд, пульт управления издаст
пикающий звук указывая на то, что включился режим
headless. Если опять нажать на эту же кнопку в течение
более 2х секунд, пульт управления издаст длинный
звук «Пи», указывая на то, что режим headless отключён . В режиме режим headless
четыре индикатора на квадрокоптере медленно мигают. Каждое мигание в течение
4х секунд.
2. В режиме headless оператору не требуется следить за
положением головы, а просто необходимо управлять
квадрокоптером с помощью джойстика направлении
на пульте управления.
3. Исправление функции определения направления вперёд:
1. При столкновении квадрокоптера с посторонними
предметами в режиме headless, если появилось
отклонение от заданного направления, требуется
только одновременно сместить акселератор и
джойстик направления в левые нижние углы до
исправления направления полета. Когда постоянно
горящий световой индикатор включения квадрокоптера
медленно замигает в течение 3 секунд, означает, что
исправление завершено.
- 14-
 10
10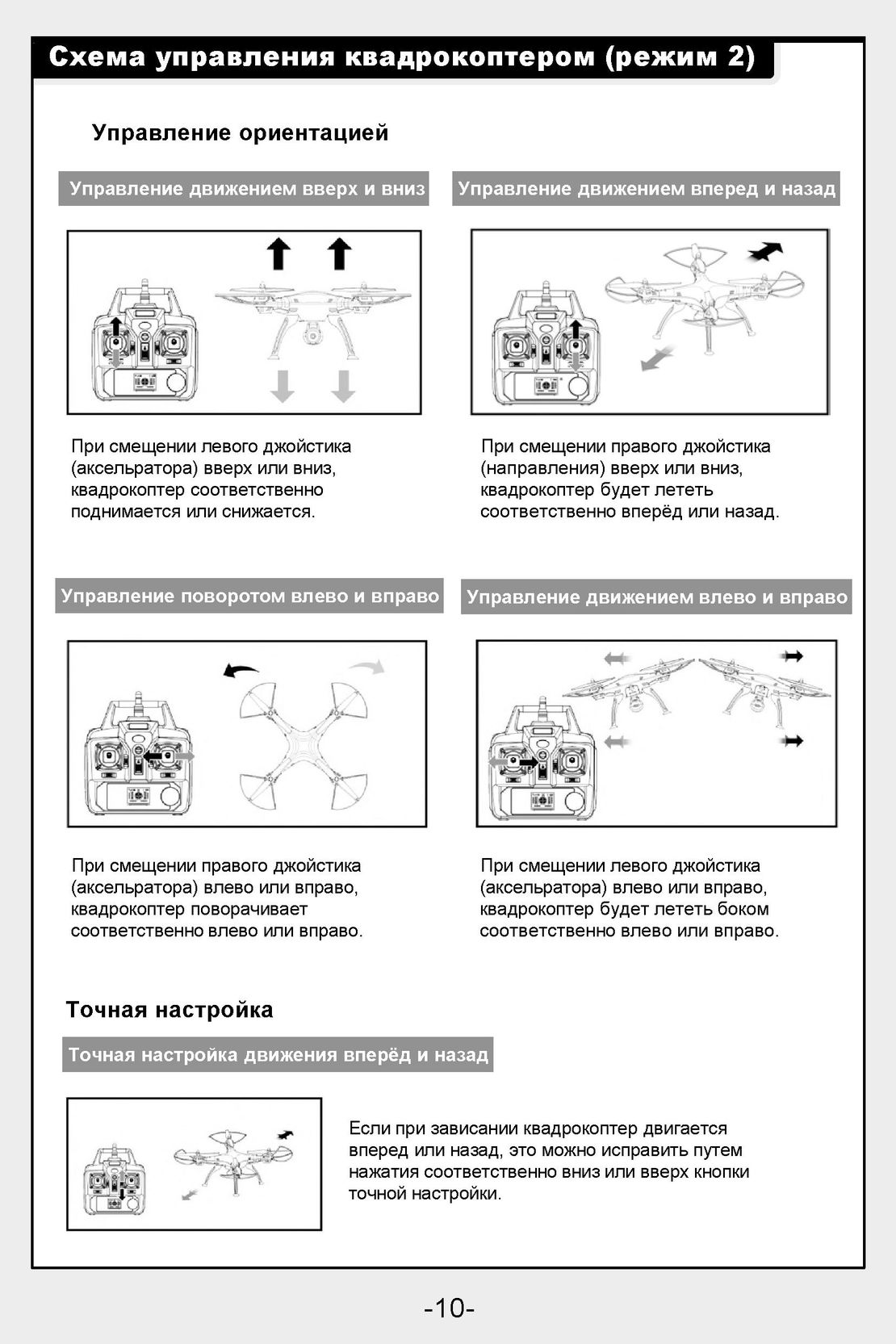 11
11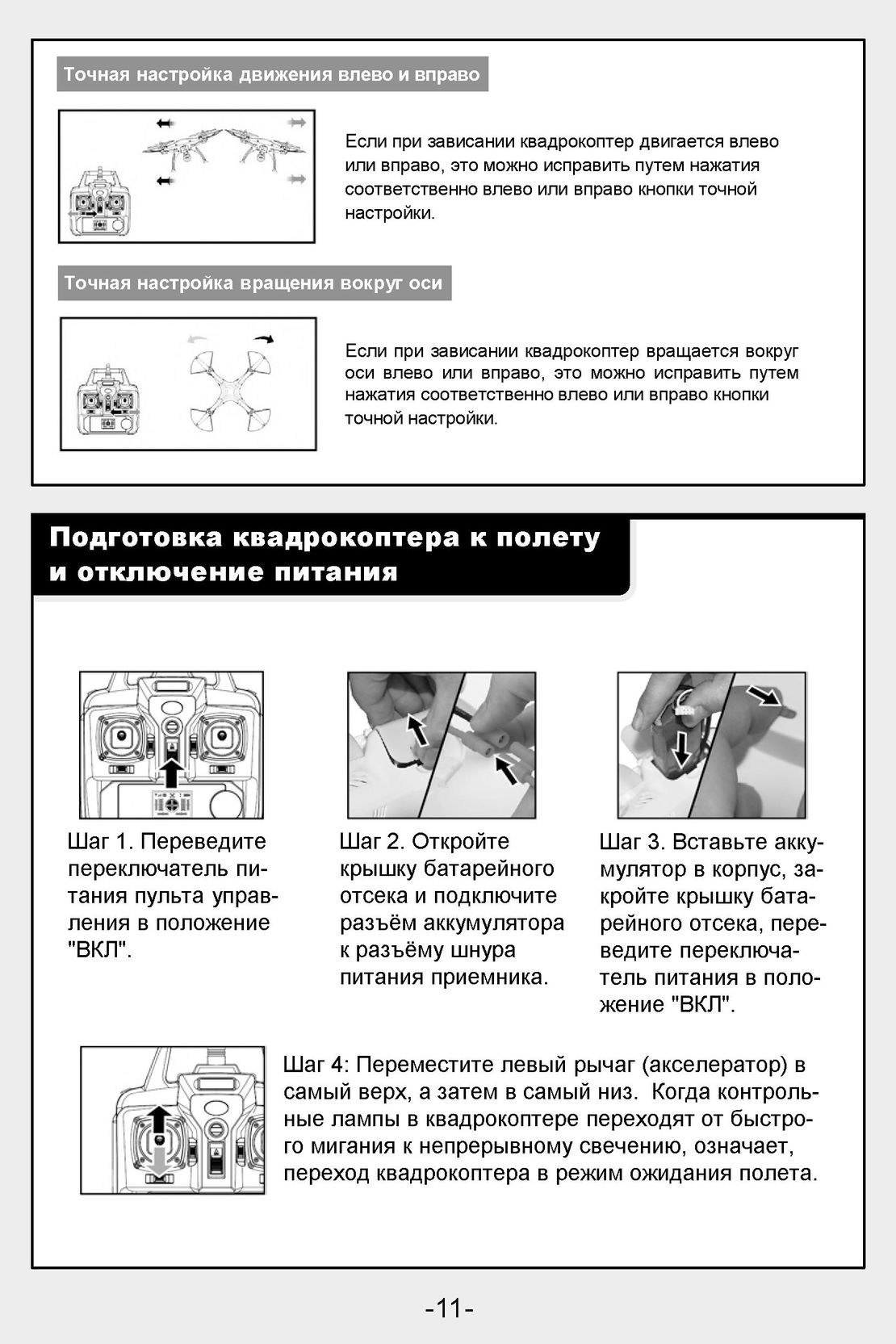 12
12 13
13 14
14 16
16 17
17 18
18 19
19 20
20 DJI Inspire 1 инструкция на русском
DJI Inspire 1 инструкция на русском DJI Mavic 2 Enterprise краткая инструкция на русском
DJI Mavic 2 Enterprise краткая инструкция на русском DJI Mavic Air инструкция на русском
DJI Mavic Air инструкция на русском RYZE Tello инструкция на русском
RYZE Tello инструкция на русском DJI Mavic 2 Pro и Zoom инструкция на английском
DJI Mavic 2 Pro и Zoom инструкция на английском Syma X7 инструкция на русском
Syma X7 инструкция на русском